مرجان محمد تقی: خودرو خودران (که گاهی خودرو بدون راننده نیز نامیده میشود) وسیلهنقلیهای است که از ترکیبی از حسگرها، دوربینها، رادار و هوش مصنوعی (AI) برای سفر بین مقاصد، بدون اپراتور انسانی استفاده میکند. برای کسب عنوان کاملا خودمختار (خودران)، یک وسیلهنقلیه باید بتواند بدون دخالت انسان بهمقصدی از پیش تعیینشده برسد. از طرفی حرکت این وسیلهنقلیه روی جادههایی است که شاید برای استفاده این نوع خودروها مناسبسازی نشده باشند.
مهمترین شرکتهایی که در حال توسعه یا آزمایش خودروهای خودران هستند عبارتند از آئودی، بامو، فورد، گوگل، جنرالموتورز، تسلا، فولکسواگن و ولوو. آزمایش گوگل شامل ناوگانی از خودروهای خودران (از جمله مدلهای تویوتا و آئودی) بود که بیش از 140 هزار مایل از خیابانها و بزرگراههای کالیفرنیا را پیمایش میکردند.
هوش مصنوعی در خودروهای خودران چگونه عمل میکند؟

فناوریهای هوش مصنوعی، سیستمهای تعبیهشده در خودروهای خودران را تقویت میکنند. توسعهدهندگان مدلهای خودران از حجم وسیعی از دادههای سیستمهای تشخیص تصویر، همراه با یادگیری ماشینی و شبکههای عصبی برای ساختن سیستمهایی استفاده میکنند که میتوانند بهطور مستقل رانندگی کنند.
شبکههای عصبی، الگوهایی را در دادهها شناسایی میکنند که از الگوریتمهای یادگیری ماشینی تغذیه میشوند. این دادهها شامل تصاویر دوربینهای خودروهای خودران است که شبکه عصبی از طریق آنها، چراغهای راهنمایی، درختان، حاشیهها، عابرانپیاده، علائم مستقر در خیابانها و جادهها و سایر بخشهای هر محیط رانندگی را شناسایی میکند و از طریق آن آموزش میبیند.
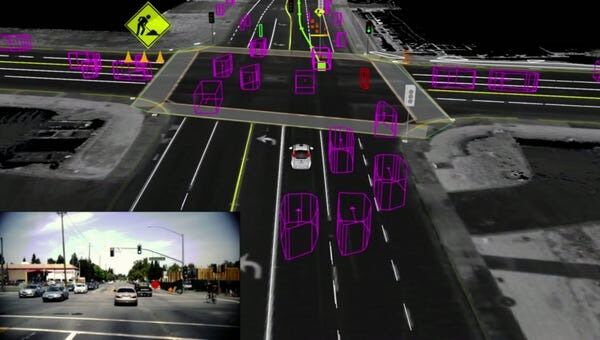
بهعنوان مثال، پروژه خودرو خودران گوگل (که Waymo نام دارد) متشکل از حسگرها، لیدار (یکی از فناوریهای سنجش از راه دور است که با تاباندن لیزر بههدف و تجزیه و تحلیل نور بازتابشده، فاصله را اندازه میگیرد) و دوربینهاست و از آنها استفاده میکند. تمام دادههایی که این سیستمها تولید میکنند، برای شناسایی محیط اطراف خودرو با یکدیگر ترکیب شده و از آن استفاده میشود. همچنین پیشبینی میشود نحوه عملکرد اشیای شناساییشده در مرحله بعدی چیست.
البته تمام این موارد و تجزیه و تحلیلها در کسری از ثانیه اتفاق میافتد. رسیدن بهبلوغ برای این سیستمها بسیار مهم است. این سیستم با رانندگی هرچه بیشتر میتواند دادههای بیشتری را در الگوریتمهای یادگیری عمیق خود بگنجاند و آن را قادر میسازد انتخابهای رانندگی دقیقتری داشته باشد.
در ادامه نحوه عملکرد وسایل نقلیه Google Waymo توضیح داده میشود. در مرحله اول راننده یا مسافر مقصدی را تعیین میکند و نرمافزار خودرو، مسیری را برای رسیدن به آن محاسبه میکند.
در مرحله بعد، یک سنسور چرخشی لیدار روی سقف، برد 60 متری اطراف خودرو را کنترل و یک نقشه پویای سه بعدی از محیط فعلی خودرو ایجاد میکند. همچنین یک سنسور در چرخ عقب سمت چپ، حرکت جانبی را برای تشخیص موقعیت خودرو نسبت بهنقشه سه بعدی نظارت میکند. سیستمهای رادار در سپر جلو و عقب، فاصله تا موانع را محاسبه میکنند.
نرمافزار هوش مصنوعی در خودرو بهتمام سنسورها متصل است و ورودیهای نمای خیابان گوگل و دوربینهای ویدئویی داخل خودرو را جمعآوری میکند.
هوش مصنوعی فرآیندهای ادراکی و تصمیمگیری انسان را با استفاده از یادگیری عمیق شبیهسازی کرده و اقدامات سیستمهای کنترل راننده (مانند فرمان و ترمز) را هم کنترل میکند.
نرمافزار خودرو برای اطلاع قبلی از مواردی مانند علائم راهنماییورانندگی و چراغها با نقشههای گوگل مشورت میکند. البته یک تابع نادیده گرفتن نیز در دسترس است که بهانسان اجازه میدهد کنترل خودرو را در دست بگیرد.
مزایا و معایب خودروهای خودران
مهمترین مزیتی که طرفداران خودروهای خودران آن را مطرح میکنند، ایمنی است. براساس آمار وزارت حملونقل ایالاتمتحده و NHTSA از تلفات ترافیکی در سال 2017، در آن سال 37 هزار و 150 نفر در تصادفات وسایل نقلیه موتوری جان خود را از دست دادند. NHTSA تخمین زده است که 94 درصد تصادفات جدی ناشی از خطای انسانی یا انتخابهای نادرست، مانند رانندگی در حالت مستی یا حواسپرتی است.
خودروهای خودران این عوامل خطرناک را حذف میکنند؛ اگرچه مدلهای خودران هنوز در برابر عوامل دیگری مانند مشکلات مکانیکی که سبب تصادف میشوند، آسیبپذیر هستند.
اگر خودروهای خودران بتوانند تعداد تصادفات را بهمیزان قابل توجهی کاهش دهند، مزایای اقتصادی آن میتواند بسیار زیاد و چشمگیر باشد. بر اساس گزارش NHTSA، آسیبهای تصادفات رانندگی بر فعالیتهای اقتصادی تاثیرگذار است؛ از جمله اینکه 57.6 میلیارددلار و 594 میلیارددلار بهترتیب در زمینههای مربوط بهبهرهوری و کارکرد افراد و مرگ و میر و کاهش کیفیت زندگی بهدلیل آسیبهای ناشی از تصادف از بین میرود.
اگر جادهها عمدتا توسط خودروهای خودران اشغال میشد، ترافیک بهآرامی جریان داشت و تراکم ترافیک کمتری وجود داشت. در خودروهای تماماتوماتیک سرنشینان میتوانند حین رفت و آمد بهمحل کار، فعالیتهای مفید دیگری هم انجام دهند.
همچنین افرادی که بهدلیل محدودیتهای فیزیکی نمیتوانند رانندگی کنند، میتوانند از طریق وسایل نقلیه خودران استقلال جدیدی را تجربه کنند و فرصت کار در زمینههایی را خواهند داشت که برای بهدست آوردن آنها، نیاز بهرانندگی است.
کامیونهای خودران در ایالاتمتحده و اروپا نیز آزمایش شدهاند تا بهرانندگان اجازه دهند از راننده خودکار در مسافتهای طولانی استفاده کنند. این امر بهراننده اجازه میدهد در کمال آرامش بهوظایف دیگر خود عمل کند و ایمنی رانندگی و بهرهوری سوخت را نیز بهبود میبخشد.
یکی از نقاط ضعف فناوری خودران میتواند این باشد که وسیلهنقلیه بدون راننده ممکن است در ابتدا آزاردهنده و غیر قابل اعتماد باشد.
همچنین با رایج شدن قابلیتهای خودران، رانندگان انسانی ممکن است بیش از حد بهفناوری رانندگی خودکار متکی شوند و ایمنی خود را بهدست اتوماسیون بسپارند. این امر زمانی ممکن است خطرآفرین باشد که رانندگان حتی زمانی که باید در صورت نقص نرمافزار یا مشکلات مکانیکی بهعنوان پشتیبان عمل کنند، باز هم کنترل خودرو را بهدست نگیرند.
مارس 2018، شاسیبلند مدل X تسلا در حالت رانندگی خودکار بود که با موانع جداکننده خطوط بزرگراه برخورد کرد. به گفته این شرکت، راننده بهرغم هشدارهای بصری و صوتی برای بازگرداندن دستانش روی فرمان و بهدست گرفتن کنترل خودرو، از انجام این کار اجتناب کرده است.
چالشهای ایمنی خودروهای خودران

خودروهای خودران باید یاد بگیرند که اشیاء بیشماری را در مسیر خودرو (از شاخه درختان و زبالهها گرفته تا حیوانات و انسانها) شناسایی کنند. همچنین چالشهای دیگری در جادهها و تونلهایی وجود دارد که با GPS تداخل میکنند.
برخی پروژههای ساختمانی نیز سبب تغییر مسیر یا لزوم اتخاذ تصمیمهای پیچیده میشوند. سیستمها باید بهطور معمول در مورد زمان کاهش سرعت، انحراف یا شتاب گرفتن مجدد و بیشتر، تصمیمات آنی بگیرند. این یک چالش ادامهدار برای توسعهدهندگان است و گزارشهایی مبنی بر تردید و انحراف غیرضروری خودروهای خودران هنگام شناسایی اشیاء در جادهها وجود دارد.
این مشکل در یک تصادف مرگبار در مارس 2018 مشهود بود که برای یک خودرو خودران رخ داد که توسط اوبر اداره میشد. این شرکت گزارش داد نرمافزار وسیلهنقلیه یک عابرپیاده را شناسایی کرد، اما نتـــوانست برای جلوگیری از برخورد با او منحرف شــــود.
این تصادف سبب شد تویوتا آزمایش خودروهای خودران خود را در جادههای عمومی بهطور موقت متوقف کند؛ اما آزمایش در مکانهای دیگر ادامه داشت. موسسه تحقیقاتی تویوتا در حال ساخت یک مرکز آزمایشی در زمینی بهمساحت 60 هکتار در میشیگان برای توسعه بیشتر فناوری خودروهای خودکار است.
در مورد تصادفات، مسئولیت عوامل نیز مطرح میشود. قانونگذاران هنوز مشخص نکردهاند که چه کسی هنگام تصادف یک خودرو خودران مسئول است. همچنین نگرانیهای جدی درمورد هک شدن نرمافزارهای مورد استفاده وسایل نقلیه خودران وجود دارد و شرکتهای خودروسازی در این زمینه، درحال تلاش برای مقابله با خطرات امنیت سایبری هستند.
خودروسازان تابع استانداردهای ایمنی وسایل نقلیه موتوری فدرال هستند و NHTSA گزارش داده است که باید کارهای بیشتری انجام شود تا وسایل نقلیه مطابق با این استانداردها باشند.
در چین خودروسازان و رگولاتورها، استراتژیهای متفاوتی را برای رعایت استانداردها و تبدیل خودروهای خودران بهواقعیتی روزمره اتخاذ میکنند. دولت چین شروع بهطراحی مجدد شهرها و زیرساختهای مربوطه کرده است تا محیطزیست را برای خودروهای خودران دوستانهتر کند.
این موارد شامل نگارش قوانینی درباره نحوه حرکت انسانها و استخدام اپراتورهای شبکه تلفن همراه برای انجام بخشی از پردازش دادههای مورد نیاز وسایل نقلیه خودران است.
منابع:
Burns, L. D., & Shulgan, C. (2018). Autonomy: The Quest to Build the Driverless Car—And How It Will Reshape Our World. HarperCollins
Chen, C.-Y., & Huang, P.-H. (2012). RETRACTED: Review of an autonomous humanoid robot and its mechanical control. Journal of Vibration and Control, 18(7), 973-982
JafariNaimi, N. (2018). Our Bodies in the Trolley’s Path, or Why Self-driving Cars Must *Not* Be Programmed to Kill. Science, Technology, & Human Values, 43(2), 302- 323
Lin, P. (2016). Why Ethics Matters for Autonomous Cars. In M. Maurer, J. C. Gerdes, B. Lenz, & H. Winner (Eds.), Autonomous Driving: Technical, Legal and Social Aspects (pp. 69-85). Springer Berlin Heidelberg
Vinsel, L. (2019). American adventure and autonomous cars. Science, 365(6449), 130-131.